시뮬레이션 테스트는 실제 테스트보다 높은 유연성과 융통성으로 위험하거나 일반적이지 않은 주행 조건을 테스트할 때 더욱 효과적일 수 있다
엔비디아(CEO 젠슨 황)가 자사의 GPU를 활용한 시뮬레이션을 통해 다양한 주행환경을 테스트함으로써 자율주행차의 안전성을 강화하고 있다고 31일 밝혔다. 자율주행차의 개발 과정에서 자율주행이 인간이 직접 운전하는 것보다 더욱 안전함을 확인하기 위해, 자율주행 기술은 다양한 주행 조건에서 까다롭고 반복적인 안전 평가를 받게 된다. 이는 실제 도로 상에서 실시하는 현실세계 테스트를 의미하지만, 동시에 ‘시뮬레이션’ 상에서 실제 주행 주행 거리를 증가시키는 것 역시 중요한 부분이다.
특히, 시뮬레이션 테스트는 실제 테스트보다 높은 유연성과 융통성으로 위험하거나 일반적이지 않은 주행 조건을 테스트할 때 더욱 효과적일 수 있다. 시뮬레이션 과정 없이 현실 시나리오에서 자율주행 차량의 대응 방식을 결정하는 것에는 한계와 위험성이 존재하기 때문이다. 예를 들면 주차되어 있는 차 뒤에서 갑자기 어린 아이가 도로로 튀어 나오거나 적색 신호에도 달리고 있는 차량과 같이 예측이 어렵지만 발생 가능성이 있는 경우들이 있다.
첨단 그래픽 기법으로 기존의 시나리오를 복제해 수정하는 것도 가능하다. 사막 지역에도 시뮬레이션을 통해 원하는 대로 눈보라를 만들어 내거나, 일출이나 일몰 시 태양빛 때문에 차량이 보이지 않는 상황을 연출하기 위해 태양의 위치 변경하는 것도 가능하다. 고속도로 상에 빙판길 구간을 만드는 것과 같이 시뮬레이션이 제공하는 통제된 방식을 통해 다양한 상황을 연출하여 시험 주행 중인 운전자의 위험 상황을 가정하는 것도 가능하다.
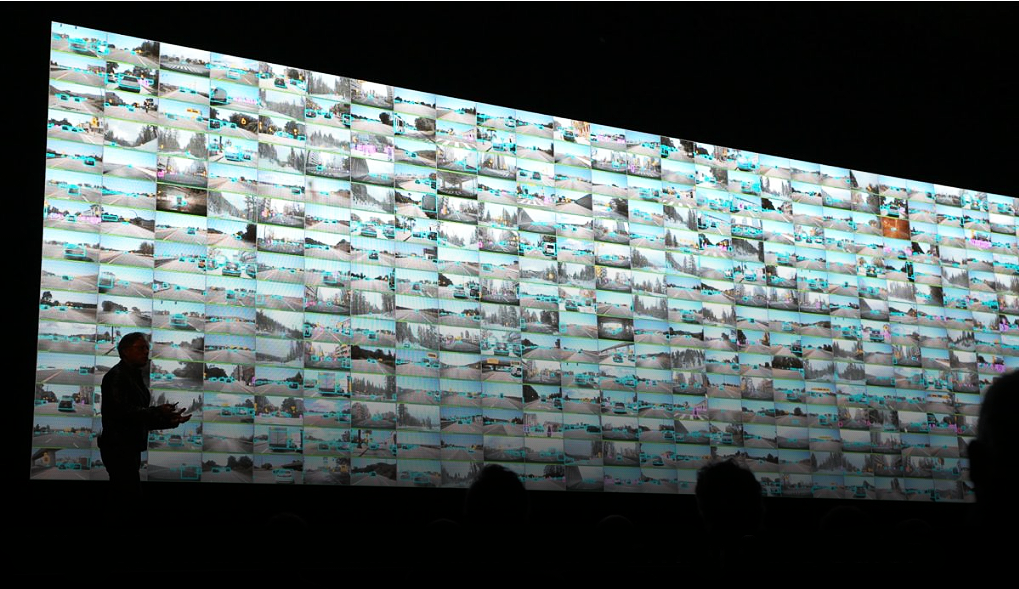
시뮬레이션에서는 짧은 시간에 다수의 시나리오를 테스트하는 것도 가능하다. 뮌헨에서 열린 GTC 유럽(GTC Europe)의 개막 기조연설에서 엔비디아 CEO인 젠슨 황(Jensen Huang)은 엔비디아 DGX(NVIDIA DGX) 및 새로운 텐서RT 3(TensorRT 3)를 통한 실시간 시뮬레이션을 통해 엔지니어들이 5시간 동안 30만 마일(약 48만 킬로미터)의 주행 시뮬레이션을 할 수 있다고 발표한 바 있다. 이는 미국 내 모든 도로를 단 이틀 만에 시뮬레이션으로 구현 가능함을 의미한다.
자율주행 차량의 트레이닝 및 테스트에서 효과적인 시뮬레이션을 위해서는 디지털 세계가 실제 세계처럼 움직여야 한다. 때문에, GPU를 기반으로 한 세밀한 그래픽과 현실감 넘치는 물리 엔진이 뒷받침 된 현실감 조성이 필수 요건으로 일단 시뮬레이션의 제작이 완료되면 자율주행 시스템과 연결되어야 하는데, 엔비디아의 통합 GPU 아키텍처는 연구소 또는 데이터센터의 시뮬레이션 환경과 차량 내 엔비디아 드라이브 PX(NVIDIA DRIVE PX) 간 자율주행 기술의 이동을 지원한다.
GTC에서 선보인 시뮬레이션 기술 드라이브 PX는 다양한 자동차용 센서에서 데이터를 취합해, 자율주행에 필요한 복잡한 소프트웨어 알고리즘을 실행하고 자율주행 방법을 차량에 전달하는 인공지능 차량 컴퓨터이다. 또한 시뮬레이션 된 센서 데이터를 입력 받아 시뮬레이션 된 주행 명령을 출력하도록 구성할 수 있다. GTC 유럽에서는 일부 기업이 이러한 방식으로 드라이브 PX를 어떻게 활용할 수 있는지 설명하고 시연하는 기회를 갖기도 했다.
IPG 오토모티브(IPG Automotive)의 도미닉 되르(Dominik Dörr)는 가상 프로토타입과 센서 모델에 대해 발표했다. IPG의 자동화된 주행 솔루션은 자율주행 엔지니어들에게 다양한 개발 노력을 통합한 전체적인 테스트 진행이 가능한 방법을 제공하고 있다. IPG측에 따르면 이를 통해 완전한 프로토타입 완료에 앞서 개별 기능이나 네트워크 상에서 조기 테스트가 가능하다. 이러한 가상 프로토타입은 시뮬레이션 환경에서 탐색하도록 구성된 드라이브 PX에서 실행된다. 드라이브 PX는 시뮬레이션 된 환경을 실제 환경에서와 동일한 방식으로 평가해, 이에 따라 주행 방향을 결정한다. 이러한 과정을 통해 엔지니어는 새롭게 개발한 자율주행 솔루션이 적절하게 작동하는지를 평가할 수 있다.

VI-grade의 로베르토 드 베키(Roberto De Vecchi)는 파트너사인 AddFor의 엔리코 부스토(Enrico Busto)와 함께 주행 중 소프트웨어의 정확성 및 차량 내 인간에게 미치는 소프트웨어의 영향에 대해 논의했다. 이를 실현하기 위해 로베르토 드 베키와 엔리코 부스토는 차량이 주행 주도권을 넘겨 받도록 안내해서 운전자가 이를 실행해야 하는 경우와 같은 운전자의 입력 사항과 드라이브 PX 상에서 실행되고 있는 자율주행 소프트웨어를 조합하는 주행 시뮬레이터를 사용한다. 이러한 테스트를 통해 업체들은 소프트웨어가 적절하게 작동하는지를 확인하고, 내부 탑승자의 주행 경험을 평가할 수 있다.
또한 데이터를 이용한 주행으로 로돌프 찰리키언(Rodolphe Tchalekian)은 ESI Group의 시뮬레이션 소프트웨어 Pro-SiVIC이 머신러닝 알고리즘의 테스트 및 트레이닝을 위한 물리적이고 사실적인 실시간 3D 가상 환경을 구현하는 방법에 대해 발표했다. 자율주행을 위해 새로운 머신러닝 알고리즘을 만들어야 하는 경우, 대규모의 트레이닝용 데이터가 필요하다. 실제 환경에서 수집한 데이터의 경우, 자율주행 알고리즘이 이를 받아들여 학습을 진행할 수 있게 하기 위해 반복적인 라벨링 작업이 필수적이다. 반대로, 시뮬레이션 된 데이터는 이미 자동적으로 라벨링 처리가 되어 있어 이 단계에서 상당한 시간을 절약할 수 있으며, 합성된 데이터 세트를 통해 새로운 알고리즘의 트레이닝이 끝나면, ESI는 드라이브 PX를 이용해 시스템이 적절히 작동하는지 확인한다. 트레이닝을 거친 머신러닝 알고리즘은 Pro-SiVIC로 시뮬레이션 된 환경에서 주행을 진행한다.

‘GTC 유럽’의 세션을 통해 타스 인터내셔널(TASS International)의 마르탱 타이먼(Martijn Tideman)은 타스의 PreScan 시뮬레이션 플랫폼을 선보였다. PreScan은 자율주행 및 기타 차량 애플리케이션 평가용 물리 기반 시뮬레이션 플랫폼이다. 과거에 PreScan은 운전자 보조 기능 및 차량 간 통신의 테스트용으로 사용됐으나 최근에는 타스의 자율주행에 필요한 딥 러닝 알고리즘의 트레이닝 및 검증에 PreScan 데이터가 활용되고 있다.
타이먼은 독일 인공지능 연구소(German Research Center for Artificial Intelligence) 및 지멘스(Siemens)와 진행한 딥 러닝에서 시뮬레이션 데이터의 가치를 보여주는 공동 프로젝트 결과를 공유했다. 해당 프로젝트에서는 딥 러닝 주행 알고리즘을 트레이닝 하는 경우, 실제 현장의 데이터만 사용하는 것보다 합성 데이터를 추가할 때 그 결과가 더욱 효과적인 것으로 나타났다.
엔비디아는 뮌헨에 이어 사상 첫 GPU 테크놀로지 컨퍼런스(GPU Technology Conference) 이스라엘을 개최했다. 시뮬레이션 스타트업 업체인 Cognata가 5명의 심사단에 사업 전략을 소개하고, 유망 AI 스타트업을 대상으로 한 인셉션 어워드(Inception Award) 공모전에서 1위를 차지했으며, Cognata는 특허 받은 알고리즘을 활용해 실제 같은 차량과 보행자의 움직임이 적용된 시뮬레이션 도시를 만들어낸다. 또한 시뮬레이션 된 환경에서 센서 입력 값을 재현하고 딥 러닝에 적용해 시뮬레이션 된 센서가 실제 환경에서처럼 정확하게 행동하도록 한다.
한편 트레이닝부터 테스트에 이르기까지, 시뮬레이션은 자율주행의 결과를 개선시킨다. 트레이닝 과정에서의 시간이 절약되고 성능은 강화되며, 실제 환경에서는 안전하지 않거나 비현실적인 시나리오도 테스트가 가능하다. 또 운전자를 통해 실제 도로에서 새로운 자율주행 기술의 성능을 평가하는 작업은 반드시 필요하다. 그러나, 시뮬레이션을 통해 실제 환경에서의 주행 시간을 보완할 수 있어 도로의 안전성을 그만큼 강화할 수 있다. 자율주행에서 GPU의 역할과 인공지능이 어떻게 실질적으로 모든 산업에 변혁을 가져오는지에 대한 자세한 사항은 워싱턴에서 열리는 GTC DC 행사(바로가기)에서 확인할 수 있다.