이제 로봇 개발자들은 감지, 탐색 및 조종을 위한 차세대 로봇에 보다 편리하게 AI를 적용하게 되며, 수백 시간을 절약할 수 있게 된다
로봇은 실제 배포에 앞서 광범위한 트레이닝 및 테스트를 거쳐야 한다. 물리적 프로토타입 생성까지를 모두 고려하면, 이 과정들은 막대한 비용이 발생하는 비현실적인 과정이 될 수 있다. 또한 로봇이 상호작용을 진행하게 될 복잡한 환경을 조성하는 작업은 안전하지 않거나 매우 복잡할 수 있으며, 로봇과 주변 환경 간에 이루어질 수 있는 모든 상호작용을 모델링 하는 것에도 상당한 시간이 소요된다.
엔비디아는 지난해 5월 AI 기반의 소프트웨어 플랫폼을 기반으로 실제와 같이 구현된 가상 환경에서 로봇을 트레이닝 시킨 후 이를 통해 확보된 지식을 현실 세계에 배포되는 로봇에 전송함으로써, 기존의 로봇 구축 과정을 크게 향상시시키는 '아이작 로봇 시뮬레이터'를 발표했었다. 엔비디아는 26일부터 29일까지 개최되고 있는 'GPU 테크놀로지 컨퍼런스 2018'에서 로봇 애플리케이션의 구축을 위한 아이작(Isaac) 플랫폼의 확대를 위해 라이브러리, 드라이버, API 및 기타 다양한 도구들을 하나로 집약시킨 아이작 소프트웨어 개발 키트(SDK)를 공개했다.
이번에 공개된 SDK를 통해 제조업체 및 연구진, 스타트업들과 개발자들은 감지, 탐색 및 조종을 위한 차세대 로봇에 보다 편리하게 AI를 적용하게 되며, 수백 시간을 절약할 수 있게 된다. 해당 SDK에서는 로봇 아키텍처 내부에서 통신을 관리하고 데이터를 전달하도록 하는 프레임워크를 제공하며, 센서를 추가, 센서 데이터를 관리하며 작동 장치를 제어하는 작업들도 실시간으로 용이하게 진행할 수 있게 된다.
특히 가상의 상황에서 자율로봇을 개발, 테스트, 트레이닝 할 수 있는 시뮬레이션 환경인 아이작 심(Isaac Sim)이 이번 SDK에 포함되어 있다는 점이 이목을 끈다. 시뮬레이션에서 트레이닝을 거친 알고리즘이 엣지 장치에서의 AI 컴퓨팅을 위해 엔비디아 젯슨(Jetson™)으로 배치되면 로봇이 실제 가동에 들어가는 것이다.
또한 엔비디아는 아이작 SDK를 기반으로 한 사상 첫 레퍼런스 디자인으로 사물 주변을 피해 운반이 가능하다는 편리함을 강조한 '배송용 로봇' 이를 ‘카터(Carter)’로 명명하고 공개했다.(메인 사진)
로봇 분야의 가능성은 무한하지만, 실제 로봇을 트레이닝하고 테스트하는 데에는 상당한 비용과 시간이 소요되며 경우에 따라서는 위험성도 내재되어 있다. 엔비디아의 아이작 심은 기존의 아이작 랩(Isaac Lab)에서 진화한 버전으로, 개발자들은 아이작 SDK로 개발한 자율형 기계를 대상으로 세밀하고 현실적인 시나리오에 따라 트레이닝 및 테스트를 진행할 수 있다. 이는 고충실도의 시뮬레이션과 보다 진보한 실시간 랜더링에 적합한 개발 툴을 사용함으로써 가능한 것이다.
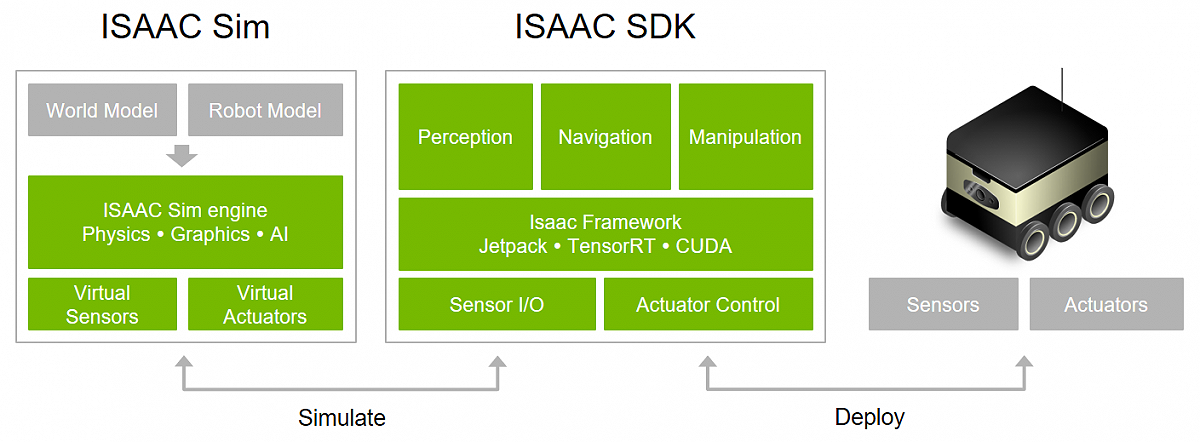
아이작 심은 아이작 SDK에서 제공하는 도구 및 프레임워크와 적절하게 들어맞기 때문에, 실제 로봇으로 데이터와 알고리즘을 송수신하는 작업이 매끄럽게 진행된다. 이는 즉 로봇 개발을 매우 빠르게 진행할 수 있는 결정적 요건을 갖춘 것이며, 보통 여러 달 걸리기 마련인 엔지니어링 및 테스트 작업도 몇 분 만에 완료할 수 있게 된다. 시뮬레이션이 일단 완료되면, 트레이닝된 시스템(뇌)을 실제 로봇으로 전송할 수 있다.
한편 엔비디아 젯슨에 아이작 SDK, 아이작 심이 통합된 이번 엔비디아 '아이작 플랫폼'은 제조, 물류, 운송, 농업, 서비스, 건설, 검사 및 기타 다양한 분야에서 자율로봇을 위한 AI 로봇 애플리케이션의 개발 및 배치에 이상적인 역할을 할 전망이며, 개발자들은 http://nvda.ws/2IHpIoq(바로가기)에서 아이작 SDK에 대한 얼리 액세스를 등록할 수 있으며, 카터 오픈 소스 디자인은 올해 말 GitHub에서 개발자들에게 공개될 예정이다.