오프라인 프로그래밍 소프트웨어를 사용해 로봇의 물리적 움직임을 실시간으로 제어하고 로봇 시스템 운영장치인 플렉스 팬던트가 없어도 로봇 프로그래밍을 가능하게
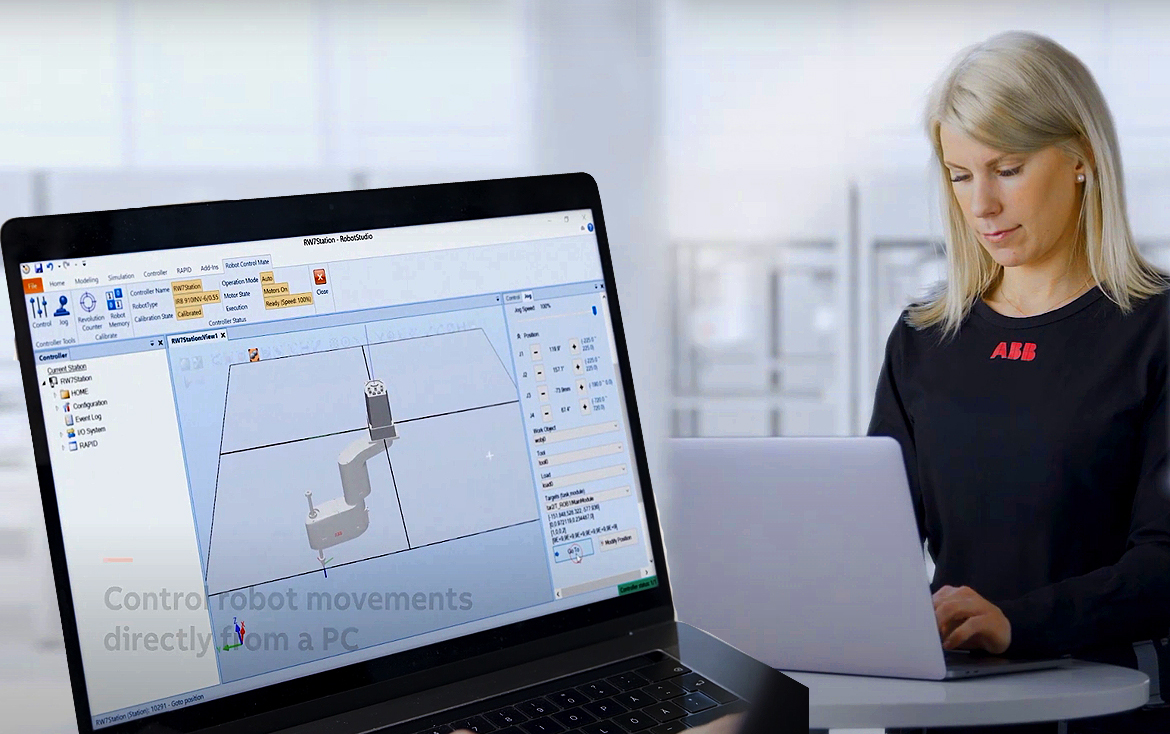
ABB는 자사의 시뮬레이션 및 오프라인 프로그래밍 소프트웨어 로봇스튜디오(RobotStudio)에 추가된 새로운 '로봇 제어 메이트(Robot Control Mate)' 기능을 통해 사용자들에게 노트북과 컴퓨터에서 직접 스칼라(SCARA) 로봇을 쉽게 연결하고 제어할 수 있다.
로봇 제어 메이트는 먼저, 천장 장착 모델인 'IRB 910INV' 로봇에서 적용되며 올해 말까지 ABB 포트폴리오의 다른 로봇으로 확대될 예정이다.

로봇 제어 메이트는 사용자가 컴퓨터에서 로봇을 티칭하고 교정할 수 있게함으로서 SCARA 로봇의 움직임을 쉽게 실시간으로 제어할 수 있게 한다. 또한 처음으로 적용된 ABB의 오프라인 프로그래밍 소프트웨어를 사용해 로봇의 물리적 움직임을 실시간으로 제어하고 로봇 시스템 운영장치인 플렉스 팬던트(FlexPendant)가 없어도 로봇 프로그래밍을 가능하게 한다.
오프라인 프로그래밍 도구는 사용자가 실제 생산 라인을 방해하지 않고 가상 3D 환경에서 완전한 로봇을 설치하고 시뮬레이션과 테스트할 수 있게 해준다. 이는 커미셔닝 중 새로운 생산 라인을 더 빨리 설치하고 최대 속도로 상승시킬 수 있음을 의미한다. 특히, 대량 맞춤화 및 짧은 제품 수명 주기로 전환할 때 이는 제조업체의 중요한 역량이기도 하다. (아래는 지난달 30일에 발표한 '로봇 제어 메이트(Robot Control Mate)'의 시연 영상)
최창현 기자
aitimes@naver.com