무인반송차(AGV), 자율주행 모바일로봇(AMR) 등으로 대표 되는 이동 로봇 시장에 진입
캐논이 카메라를 이용하여 특징점 추출하고 자기 위치 추정 및 환경지도 작성을 동시에 실시하는 '비주얼 SLAM(Visual Simultaneous Localization and Mapping)' 기술을 포함한 이동 로봇의 '눈'이 되는 영상 분석 소프트웨어(비전 기반 네비게이션 소프트웨어)를 지난 5일 출시하고 무인반송차(AGV), 자율주행 모바일로봇(AMR) 등으로 대표되는 이동 로봇 시장에 진입했다.
캐논은 현실 세계와 3D CG를 실시간으로 융합하는 혼합현실(MR, Mixed Reality) 기술 개발과 공간 특징 정렬 기술을 활용하여 비주얼 SLAM 기술을 포함한 영상 분석 소프트웨어의 실용화에 성공한 것이다.

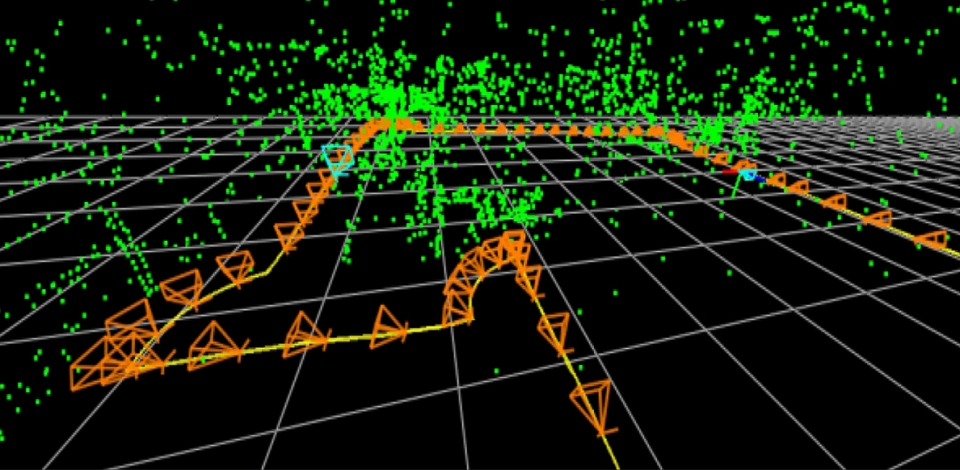
본격 출시한 비주얼 SLAM 기술은 카메라를 이용하여 촬영 된 영상에서 주변 환경의 3 차원 정보와 카메라의 위치 및 자세를 동시에 추정하고 수평 · 수직 표면의 넓은 화각으로 촬영 된 카메라의 영상 데이터를 이용하기 때문에 변화가 많은 현장에서도 정밀하게 위치 자세를 측정할 수 있다고 밝혔다.
캐논은 창업 이래 광학 기술을 중심으로 한 다양한 영상 기술의 혁신을 거듭 고성능 카메라와 렌즈외 최근에는 그 영역을 네트워크 카메라 등의 분야로 확장하고, 업체와의 협업을 통해 산업 및 생산 현장에서 자동화와 가시화를 추진하고 있다.

한편, 이 솔루션은 1차로 일본 전산 심포(NIDEC-SHIMPO)가 5일 출시한 무인반송차 'S-CART-V(탑재중량 100kg, 주행속도 최대 60m/min)'시리즈에 탑재됐다. 케논은 점차 이 기술을 청소, 운반 경비, 검사, 탐사 등 다양한 용도로 활용되는 서비스 로봇이나 무인 항공기에 탑재하는 것을 목표로 한다.