
매스웍스(Mathworks)가 매트랩(MATLAB)과 시뮬링크(Simulink)의 릴리스 2020b(이하 R2020b)를 발표했다. R2020b의 매트랩은 새로운 기능을 통해 그래픽 및 앱 작업을 간소화시키며, 시뮬링크는 이번 업데이트를 통해 한층 확장된 액세스 범위 및 향상된 속도와 함께 웹 브라우저를 통해 액세스 가능한 시뮬링크 온라인(Simulink Online)을 제공한다.
또한, R2020b는 인공지능(AI) 기능 기반으로 빌드된 툴박스, 자율 시스템 개발을 가속화하는 툴박스 및 자율주행 시뮬레이션을 위한 3D 장면 생성을 가속화하는 툴박스를 새롭게 신제품으로 포함한다. R2020b에 대한 자세한 정보는 R2020b 비디오에서 확인할 수 있다.
R2020b의 수백 개의 새로운 기능 및 업데이트 된 기능 중, 매트랩은 새로운 거품형 차트와 스웜 차트, 매트랩 비교 툴(MATLAB Comparison Tool)을 통한 앱 디자이너(App Designer) 앱 비교 및 병합 기능, 그리고 커스터마이징 가능한 그림 아이콘 및 컴포넌트를 매트랩 앱에 추가했다. 또한 R2020b는 웹 브라우저를 통해 시뮬링크 모델을 조회, 편집 및 시뮬레이션할 수 있는 시뮬링크 온라인뿐 아니라, 시뮬링크에서 참조된 모델 계층 구조의 코드를 최대 2배 더 빠르게 생성하는 기능을 도입했다. 이 외에도 R2020b는 지속적인 통합 워크플로우 자동화를 지원하는 새로운 자동 병합 기능을 포함한다.
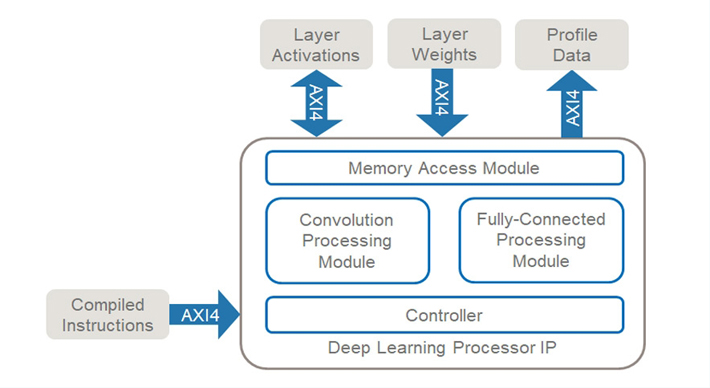
R2020b의 새로운 딥러닝 HDL 툴박스(Deep Learning HDL Toolbox)는 알고리즘 개발자와 하드웨어 설계자를 대상으로 FPGA 및 SoC에서의 딥러닝 네트워크 구현 및 프로토타입 생성을 돕는 함수 및 툴을 제공하며, 자일링스(Xilinx) 및 인텔(Intel)의 FPGA 및 SoC 디바이스에서 다양한 딥러닝 네트워크를 실행할 수 있는 사전 작성된 비트스트림을 제공한다.
설계, 성능 및 리소스 활용의 상충관계를 탐색하여 딥러닝 네트워크를 커스터마이징할 수 있는 프로파일링(성능 측정) 및 측정 툴도 제공한다. 본 툴박스와 HDL 코더(HDL Coder) 및 시뮬링크를 함께 사용하는 엔지니어는 딥러닝 네트워크의 하드웨어 구현을 사용자 지정 방식으로 커스터마이징하고, 이식 및 합성 가능한 Verilog 및 VHDL 코드를 생성하여 FPGA에 배포할 수 있다.
특히, R2020b부터 딥러닝 툴박스(Deep Learning Toolbox)는 시뮬링크에서의 딥러닝 모델용 코드 생성 및 시뮬레이션을 돕는 이미지 분류(Image Classification) 및 네트워크 예측(Network Prediction) 블록을 지원한다. 업데이트 된 익스페리먼트 매니저(Experiment Manager) 앱은 병렬 방식의 딥러닝 네트워크 훈련 및 베이지안 최적화를 이용한 하이퍼파라미터 조정이 가능하다. 또한, 향상된 딥 네트워크 디자이너(Deep Network Designer) 앱에서는 이미지 분류, 시맨틱 분할(semantic segmentation), 다중 입력, 메모리 부족, 이미지-이미지 회귀 및 기타 워크플로우를 네트워크에 훈련시킬 수 있다.
또한 R2020b에는 자율 시스템을 위한 두 가지 신제품과 주요 업데이트가 포함돼 있다. 라이다 툴박스(Lidar Toolbox)는 라이다 처리 시스템의 설계, 분석, 테스트를 위한 알고리즘, 함수 및 앱을 제공하는 신제품이다.
무인 항공기 툴박스(UAV Toolbox)는 무인 항공기 및 드론용 애플리케이션의 설계, 시뮬레이션, 테스트 및 적용을 위한 툴 및 참조 애플리케이션을 제공하는 또 다른 신제품이다. 센서 퓨전 및 추적 툴박스(Sensor Fusion and Tracking Toolbox)의 업데이트에는 그리드 기반의 무작위 유한 세트(RFS) 트래커를 이용하여 객체를 추적하는 기능 및 지구 중심의 웨이포인트를 이용하여 궤도를 생성하는 기능이 포함된다.
아울러 R2020b의 새로운 툴박스는 자동차 산업에 특화된 로드러너(RoadRunner) 제품군에 속하는 새로운 로드러너 신 빌더(RoadRunner Scene Builder) 제품은 HD 지도의 도로망 생성을 자동화한다. 오토사 블록셋(AUTOSAR Blockset)은 업데이트를 통해 ARXML 파일 가져오기 및 내보내기를 위한 스키마 버전 4.4를 지원하며, 오토사 호환 C코드를 생성할 수 있다.
또한, 어댑티브(Adaptive) 모델을 위한 리눅스(Linux) 실행 파일을 제공하므로 오토사 어댑티브(AUTOSAR Adaptive) 실행 파일을 생성하여 독립형 애플리케이션으로 실행할 수 있다. 차량 역학 블록셋(Vehicle Dynamics Blockset)은 이제 3개의 차축을 갖는 6DOF 트레일러 및 차량을 구현하는 기능과 언리얼 엔진(Unreal Engine) 3D 환경에서 트랙터 및 트레일러를 시각화하는 시뮬링크 3D 블록을 포함한다.
한편, R2020b는 전세계에서 지금 바로 이용 가능하다. 매트랩 및 시뮬링크의 모든 신제품, 개선 사항 및 버그 수정 정보는 R2020b 하이라이트 페이지에서 확인할 수 있다.