AI가 생물학적(뇌) 모델을 모방하도록 만들어지면 효율성과 신뢰성이 높아질 수 있다... 이 새로운 AI 시스템은 몇 개의 인공 뉴런만으로 자율 주행 차량을 제어할 수 있다

인공지능은 검색 엔진에서부터 자율주행 자동차에 이르기까지 우리의 일상생활을 도모하고 있다. 이것은 최근 몇 년 동안 이용할 수 있게 된 엄청난 컴퓨팅 파워와 관련이 있다. 그러나 AI 연구의 새로운 결과는 이제 어떤 일을 전보다 훨씬 더 잘하고 더 효율적으로, 그리고 더 안정적으로 해결하기 위해 더 단순하고 작은 신경망을 사용할 수 있다는 것을 보여준 사례가 있어 소개해 본다.
오스트리아 과학기술연구소(IST Austria), 오스트리아 빈 공과대학(Technische Universität Wien. 이하 TU Wien), MIT 컴퓨터과학인공지능연구소(CSAIL)의 국제 연구팀이 실벌레와 같은 작은 동물의 뇌를 기반으로 한 새로운 혁신적인 딥러닝 기반 인공지능(AI) 시스템을 개발했다. 이 새로운 AI 시스템은 몇 개의 인공 뉴런만으로 자율 주행 차량을 제어할 수 있다.
이 공동 연구팀의 AI 시스템은 이전의 딥러닝 모델보다 결정적인 이점을 가지고 있다고 한다. 그것은 복잡한 입력에 훨씬 더 잘 대처하고 단순성과 또한 작동 방식을 자세히 설명될 수 있다. 복잡한 '블랙박스'로까지 볼 필요는 없지만, 과정을 사람이 보고 이해할 수 있다.
살아있는 뇌와 비슷하게, 인공신경망은 많은 개별 세포로 구성되어 있다. 세포가 활성화되면 다른 세포에 신호를 보낸다. 다음 셀이 수신하는 모든 신호를 결합해 이 셀도 활성화 될지를 결정한다. 한 셀이 다음 셀의 활동에 영향을 미치는 방법은 시스템의 동작을 결정한다. 이러한 매개변수는 신경망이 특정한 과제를 해결할 수 있을 때까지 자동 학습 과정에서 조정된다.
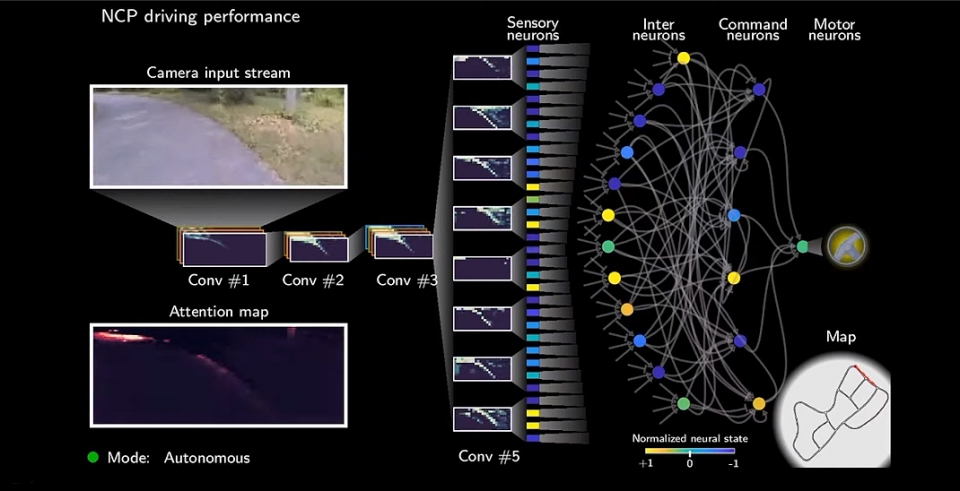
연구팀은 뇌에서 영감을 받은 신경 계산 원리와 확장 가능한 딥러닝 아키텍처를 결합해 AI 시스템을 개발한 것으로 이 AI 시스템은 기본적으로 카메라 입력에서 직접 자율주행차 제어법을 익히는 두뇌집약형 지능형 에이전트로 보면 된다. 연구팀은 32개의 캡슐화 된 입력 기능을 253개의 시냅스로 출력하는 19개의 제어 뉴런을 가진 단일 알고리즘이 고차원 입력을 조향 명령에 매핑하는 법을 학습한다는 것을 발견했다.
또, 이 연구의 흥미로운 사실들 중 하나는 AI가 생물학적 뇌에서 일어나는 것으로 알려진 신경 계산에서 영감을 받아 상당한 수준의 제어 능력을 달성한다는 것이다. 그들은 선충(Nematode)처럼 작은 동물들로부터 영감을 얻었다. 또한 연구팀은 다른 것들 중에서 운동, 항법 등의 수행 능력을 각인시키려고 노력했다.
라두 그로수(Radu Grosu) 빈 공과대학 사이버-물리적 시스템(Cyber-Physical Systems)연구소 소장은 "몇 년 동안, 우리는 딥러닝을 향상시키기 위해 자연으로부터 배울 수 있는 것을 연구해 왔습니다. 예를 들어, 선충은 놀랍게도 적은 수의 뉴런으로 삶을 살아가고 있으며, 여전히 흥미로운 행동 패턴을 보여주고 있습니다. 이는 선충의 신경계가 정보를 처리하는 효율적이고 조화로운 방법 때문입니다"라고 말했다.
다니엘라 러스(Daniela Rus) MIT 컴퓨터과학인공지능연구소(CSAIL) 소장은 "자연은 우리에게 아직도 개선의 여지가 많다는 것을 보여줍니다. 우리의 목표는 복잡성을 크게 줄이고 신경망 모델의 해석성을 높이는 것이었습니다"라고 말했다. 토마스 헨징거(Thomas Henzinger) 오스트리아 과학기술연구소 소장은 "자연에서 우리는 뉴런과 시냅스의 새로운 수학 모델을 개발한 것입니다"라고 말했다.
최근 몇 년 동안, 딥러닝과 같은 기술은 복잡한 응용에서 결과의 효율성으로 인해 연구자들과 조직들 사이에서 많은 주목을 받고 있다. 연구팀에 따르면, 딥러닝 알고리즘은 다양한 고차원적 과제에서 주목할 만한 성공을 거두었지만, 이러한 알고리즘은 다양한 표현 학습(Representation-learning) 과제에 직면해 있다고 한다.
또한 연구팀은 표현 학습 과제를 보편적으로 만족시키는 단일 과제별 알고리즘의 개발을 향해 나아갔다. 더욱이 자율주행차의 경우 학습된 차량제어 에이전트가 오프라인 테스트 및 시뮬레이션에서 뛰어난 성능을 보이는 경우가 많지만, 이는 라이브 주행 중 상당히 저하된다. 자율주행차의 핵심 과제 중 하나는 종단 간(end-to-end) 제어를 학습하는 능력이다. 이 다양한 문제를 완화하기 위해 연구팀은 주로 두 가지 구성 요소를 갖춘 AI 시스템을 개발한 것으로 두 가지는 카메라와 뇌에서 영감을 받은 지능형 에이전트다.
이 AI 시스템의 경우 연구팀은 NCP(Neural Circuit Policies)라는 간결한 표현을 개발했는데, 여기서 각 뉴런은 현대의 심층 모델에 비해 계산 능력이 향상되었다. 이 과정에서 표현 학습의 도전은 자율 제어 에이전트의 성능을 평가하는 주요 기준으로 간주되었다. 표현 학습 문제와 자율 차선 유지등의 복잡성을 해결하기 위해 개발된 NCP는 일련의 컨볼루션 계층(Convolutional Layers)에서 입력을 인식하고 이미지 특징을 추출하며 순환신경망(RNN) 구조에 의해 제어를 수행하는 종단 간 학습 시스템이다.
여기서 NCP는 딥러닝에 비해 시계열 모델링에서 표현력을 향상시키는 비선형 시간변동 시냅스 전송 메커니즘을 가지고 있다. NCP의 기본 신경 구축 블록은 LTC(Liquid Time Constant) 네트워크라고 한다.
앞에서 언급한 바와 같이 NCP의 네트워크 구조는 선충의 배선도에 의해 영감을 받는다. 연구원들에 따르면, 선충의 배선도는 주로 센서에서 중간 뉴런으로 전달되는 연결, 뉴런과 명령 뉴런 사이의 반복성이 높은 연결, 명령 뉴런에서 운동 뉴런으로 전달되는 연결로 약 90%의 희소성을 달성한다고 한다. 이 특정 토폴로지는 효율적인 분산 제어, 소수의 뉴런이 필요한 계층적 시간 역학, 로봇-학습 능력, 희소 흐름 네트워크(Sparse-Flow Network)에서 최대 정보 전파 등과 같은 매력적인 계산적 이점을 가지고 있는 것으로 나타났다.
결론적으로 풀스택 NCP 네트워크는 최첨단 종단 간의 주행을 구축한 컨볼루션 신경망보다 63 배 더 작다. 또한 NCP의 제어 네트워크는 LSTM (Long Short Term Memory) 보다 970배, CT-RNN보다 241배 더 빠르다. 또한 NCP의 RNN 구획은 LSTM보다 233배, CT-RNN보다 더 적은 훈련 가능한 매개 변수 공간을 가지고 있다. 이 모델은 블랙박스의 투명성을 향상시키고 이전에 보지 못했던 도로에서 차량을 능숙하게 제어할 수 있다.
또한 AI 시스템에는 풀스택 자율 주행 차량 제어 시스템의 작업 별 구획을 위한 소형 신경 컨트롤러가 포함되어 있다. NCP가 더 쉽게 해석할 수 있고 자율 주행의 맥락에서 쉽게 시연할 수 있는 희소 네트워크로 이어진다는 것을 보여주었다. 또한, 이러한 컴팩트한 신경 표현으로 달성 된 성능은 이상적인 자율 이동 로봇 컨트롤러의 여러 측면에서 다른 모델보다 우수하다. 즉, 컨볼루션 신경망(CNN)과 결합 된 뇌에서 영감을 받은 신경 모델은 고차원 입력에서 직접 차량을 조종하는 방법을 학습하는 데 있어 최첨단 모델에 비해 우수한 성능을 달성한 것이다.
특히, 자율 주행 차를 위한 NCP의 장점으로는 이전에 볼 수 없었던 도로에서 차량을 능숙하게 제어할 수 있는 매우 컴팩트한 작업 별 신경망 에이전트이며, 동시에 인공물을 입력하고 단기 인과 관계 표현을 학습하며, 해석 가능한 역학을 실현할 수 있어 NCP는 풀스택 자율 주행 차량 프레임 워크 내에서 유용하게 사용할 수 있다. 또한, 복잡한 풀스택 자율 주행 차량 시스템의 작업 별 블랙박스 구획에서 성능과 투명성을 개선하도록 설계되었다.
한편, 이 연구 결과는 네이처 머신 인텔리전스(Nature Machine Intelligence)에 '감사 가능한 자율성을 가능하게 하는 신경회로 방책(Neural circuit policies enabling auditable autonomy- 보기)'이란 제목으로 지난 13일 게재됐으며, 이 NCP 플랫폼에 대한 코드는 깃허브(다운)를 통해 다운 받아 누구나 사용할 수 있다. (아래는 이 플랫폼을 적용한 '자율 주행차를 위한 생물학적 영감을 받은 신경망'이라 제목으로 MIT 컴퓨터과학인공지능연구소가 지난 14일 업로드한 데모 영상이다.)
관련기사
- [AI 리뷰] 작물 질병을 식별하는 인공지능 앱 만들기... 오픈 소스를 통한 간단한 방법들
- [AI 리뷰] MIT 연구팀, 머신러닝으로 잠재적인 새로운 결핵 치료제 발견
- [AI 리뷰] 인공지능 시대를 위한 리더들의 10 가지 핵심 리더십은?
- [AI 리뷰] 양자 컴퓨팅 통신 위한 큐빗 생성으로... 완전한 양자 컴퓨팅 플랫폼으로 가는 길 열어
- [AI 리뷰] 인공지능 학습 이미지에서 편견을 식별하는 AI 툴... 오픈 소스로 공개
- [AI 리뷰] 유엔식량농업기구, 농업에서 인공지능 도입은 식량 불안을 해결하고, 디지털 격차를 해소시킨다!
- [AI 리뷰] 모든 것을 지능화... 바이두, 4 가지 새로운 인공지능 기술 발표
- [AI 리뷰] 머신러닝으로 화상회의에서 배경 마음대로 바꾼다... 구글 미트 새로운 AI 기능
- [AI 리뷰] 바이탈사인(VS) 모니터링 선별적 제한하는 인공지능... 입원환자 수면 개선으로 치료 효과 증대
- [AI 리뷰] 구글 AI, 실시간 3D 객체 감지 위한 '오브젝트론 데이터 세트' 오픈 소스로 공개
- [AI 리뷰] 계층 구조로서의 예측... 미래를 예측하는 'AI 프레임워크' 오픈소스로 공개