로봇 조작에 널리 사용되지만 데이터가 비효율적인 강화학습 알고리즘과 달리 제안된 케이지 기반(Cage-based) 표현과 시뮬레이터는 강력한 그래디언트(Gradient) 기반 방법을 사용
로봇공학에서 적절한 생체모방은 디자인과 제어 사이의 미묘한 균형을 필요로 하는데, 이것은 로봇이 인간을 더 닮게 만드는 데 필수적인 부분이다. 새로운 로봇 매니퓰레이터(Manipulator)를 설계하는 것은 인간의 직관에 따라 설계, 제작 및 평가하는 길고 수동적인 반복 주기를 의미할 수 있다.
MIT 컴퓨터과학 및 인공지능연구소(CSAIL)의 연구팀은 특정 작업을 위해 로봇 조작기의 모양과 제어를 계산적으로 최적화하는 새로운 방법을 개발했다. 그들의 시스템은 소프트웨어를 사용하여 설계를 조작하고, 작업을 수행하는 로봇을 시뮬레이션 한 다음, 설계 및 제어를 평가하기 위한 최적화 점수를 제공한다.
이러한 작업 중심의 매니퓰레이터 최적화는 제조와 물류 및 창고 로봇 시스템에서 다양한 응용 분야에 대한 잠재력을 가지고 있으며, 각 작업은 반복적으로 수행되어야 하지만 개별 작업에는 또 다른 새로운 매니퓰레이터가 하다.
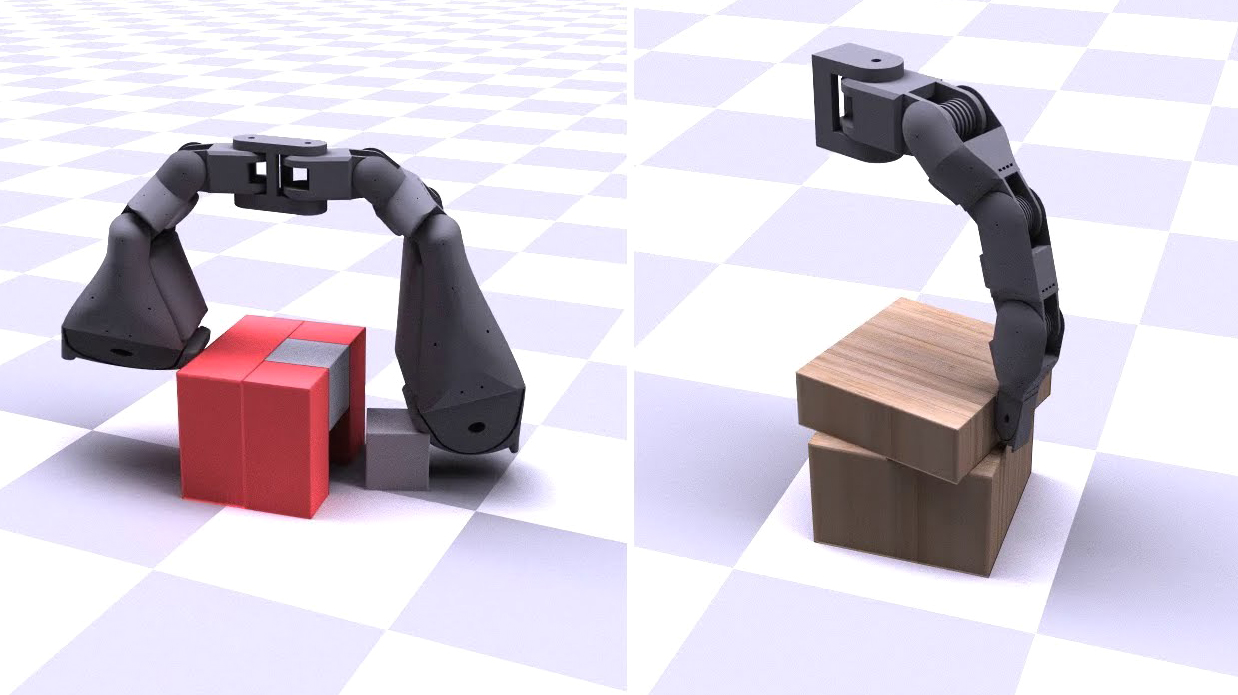
연구팀은 시스템의 기능을 테스트하기 위해 팀은 먼저 바닥에 있는 상자를 뒤집는 단일 로봇 손가락 모델을 만들었다. 마치, 후크 선장의 왼손처럼 보이는 손가락 끝 구조는 상자 뒷면에 걸고 뒤집는 알고리즘에 의해 자동으로 최적화되었다.
또한 두 손가락 모델은 작은 큐브를 더 크고 움직일 수 있는 마운트에 넣는 조립 작업을 위해 개발했다. 두 손가락의 길이가 다르기 때문에 크기가 다른 두 물체에 닿을 수 있었고, 손가락의 더 크고 평평한 표면은 물체를 안정적으로 미는 데 도움이 되었다.
좀 더 관련된 매니퓰레이터를 만들기 위해, 연구팀은 '케이지 기반 변형(Cage-based deformation)'이라는 알고리즘을 사용했는데, 이것은 본질적으로 사용자가 실시간으로 모양의 기하학을 바꾸거나 변형시킬 수 있게 해준다.
이 알고리즘을 사용하면 로봇 손가락 주위에 케이지(cage)처럼 보이는 것을 놓을 수 있으며, 케이지 치수를 자동으로 변경하여 보다 정교하고 자연스러운 모양을 만들 수 있다. 다양한 디자인의 변형은 여전히 무결성을 유지하므로 쉽게 제작할 수 있다.
MIT 박사 과정이자 이 연구 논문의 저자인 지수(Jie Xu) 연구원은 "이러한 시뮬레이션 도구를 사용하면 실제, 세계에서 설계를 제조하고 테스트하여 설계를 평가할 필요가 없습니다"라고 말했다.
또한 그는 "조작에 널리 사용되지만 데이터가 비효율적인 강화학습 알고리즘과 달리 제안된 케이지 기반(Cage-based) 표현과 시뮬레이터는 강력한 그래디언트(Gradient) 기반 방법을 사용했습니다"라며, "이 방법은 더 나은 솔루션을 찾을 뿐만 아니라 더 빨리 찾아, 결과적으로 우리는 신속하게 설계 주기를 크게 단축할 수 있었습니다”라고 덧붙였다.
한편, 연구팀은 여러 작업에 대해 동시에 매니퓰레이터를 최적화하기 위해 소프트웨어를 확장할 계획이며, 이 연구 결과는 현지시간 12일부터 16일까지 가상으로 개최되는 2021 로봇 공학, 과학 및 시스템(Robotic Science and Systems, RSS 2021) 컨퍼런스에서 '접촉 인식 로봇 설계를 위한 종단 간 미분 프레임워크(An End-to-End Differentiable Framework for Contact-Aware Robot Design-다운)'이란 제목으로 발표됐으며, 해당 코드(다운)는 깃허브를 통해 공개했다.