라바 소프트웨어 프레임워크는 뉴로모픽 연구 커뮤니티에서 필요로 하는 공통 소프트웨어 프레임워크를 제공으로 개발자들은 전용 뉴로모픽 하드웨어에 접근하지 않고도 뉴로모픽 애플리케이션을 구축할 수 있다.

생물학적 두뇌와 더 유사하게 작동하는 칩을 만들기 위해 신경 과학으로부터 확보한 통찰력을 활용하는 뉴로모픽 컴퓨팅은 시각, 음성 및 제스처 인식부터 정보 검색, 로보틱스 및 제한된 상황에서의 최적화된 문제 해결능력 등 광범위한 인공지능(AI) 엣지 애플리케이션에서 필요로 하는 에너지 효율성, 계산 속도, 학습 효율성을 대폭 개선한다.
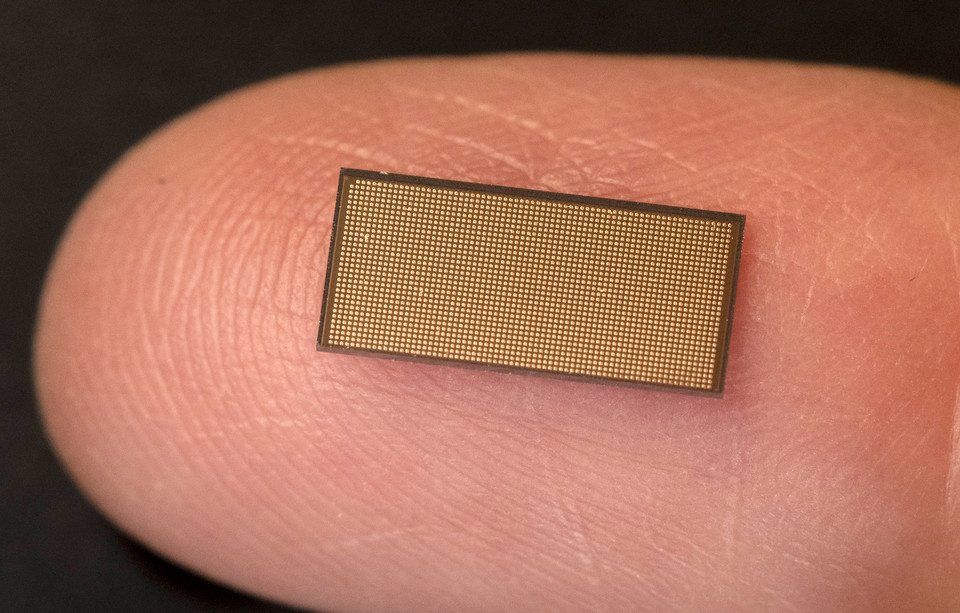
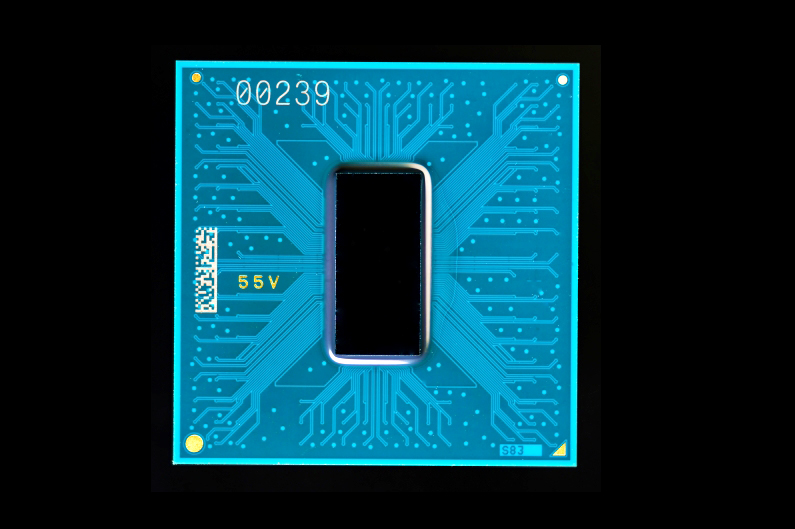
뉴로모픽 기술 발전에서 인텔의 지속적인 진전을 보여줬다. 9월 30일(현지시간) 인텔은 2세대 뉴로모픽 연구 칩 ‘로이히 2’ 및 신경 구조에서 영감을 받은 응용프로그램 개발을 위한 오픈소스 소프트웨어 프레임워크 ‘라바(Lava)’를 발표했다. 이번 발표는 보여준다.
마이크 데이비스(Mike Davies) 인텔 뉴로모픽 컴퓨팅 연구소장은 “로이히2와 라바는 기존의 로이히를 사용한 수년간의 공동 연구를 기반으로 확보한 통찰력의 결실이다. 오늘 공개한 2세대 칩은 뉴로모픽 프로세싱의 속도, 프로그래밍 역량 및 용량을 크게 향상시켰다"고 말했다.
이어 그는 "전력 및 지연시간 등이 제한된 환경의 지능형 컴퓨팅 애플리케이션에서도 폭넓게 활용될 수 있다”며 “인텔은 라바를 오픈 소싱함으로써 현장에서의 소프트웨어 융합, 벤치마킹 및 플랫폼 간 협업의 필요를 충족하며, 상용화를 향한 진전을 가속할 것”이라고 설명했다.
현재까지 인텔이 파트너사와 함께 선보인 애플리케이션에는 로봇 팔, 뉴로모픽 피부, 후각 감지 등이 포함된다.
로이히2 는 1세대 로이히 칩을 활용한 3년 간의 연구 결과와 인텔의 공정 기술 및 비동기식 설계 방법을 통합해 제작됐다.
라바는 기존 및 뉴로모픽 프로세서 등 이기종 아키텍처에서 원활하게 실행할 수 있으며, 교차 플랫폼 실행 및 다양한 AI, 뉴로모픽 및 로보틱 프레임워크와 상호 운용이 가능하다.
개발자들은 이제 전용 뉴로모픽 하드웨어에 접근하지 않고도 뉴로모픽 애플리케이션을 구축할 수 있으며, 라바를 다른 플랫폼에서 실행할 수 있는 포팅을 포함해 라바 코드 베이스에 기여할 수 있다.
게르드 쿤데(Gerd J. Kunde), 로스앨러모스 국립 연구소 수석 과학자는 “로스앨러모스 국립 연구소 연구원들은 로이히 뉴로모픽 플랫폼을 활용해 양자 컴퓨팅 및 뉴로모픽 컴퓨팅 간의 절충점을 살펴보고, 온칩 학습 프로세스를 구현하고 있다. 해당 연구는 난해한 최적화 문제를 풀기위해 급증하는 신경망과 양자 가열 냉각 접근법 간에 놀라운 유사한 점이 있다는 것을 밝혀냈다"고 밝혔다.
이어 그는 "신경망을 훈련하기 위한 기본 구성 요소이자 이전에는 뉴로모픽 아키텍처에서 구현할 수 없다고 여겨졌던 역전파 알고리즘이 로이히를 통해 효율적으로 실현될 수 있음을 입증했다. 연구팀은 2세대 로이히 칩으로 해당 연구를 지속할 수 있게 돼 매우 기쁘다”라고 말했다.
로이히2와 라바는 다음과 같이 연구자들이 실시간 처리, 문제 해결, 적용 및 학습을 위한 신경 구조에서 영감을 받은 새로운 애플리케이션을 개발하고 특성화 할 수 있는 도구를 제공한다:
보다 빠르고 보다 일반적인 최적화 기능으로 로이히2의 향상된 프로그래밍 역량은 실시간 최적화, 계획 및 엣지부터 데이터센터 시스템까지에서의 의사 결정을 포함해 더 많은 종류의 어려운 최적화 문제를 지원할 수 있다.
지속적이고 연관성 있는 학습을 위한 새로운 접근법으로 로이히2는 딥러닝의 워크호스(workhorse) 알고리즘인 역전파 변형을 포함한 개선된 고급 학습 방법을 제공한다. 따라서 온라인 환경에서 작동하는 저전력 폼팩터로 지원할 수 있는 적응 및 데이터 효율적인 학습 알고리즘 범위가 확대될 수 있다.
딥러닝으로 훈련 가능한 새로운 신경망으로 로이히2의 완전히 프로그래밍 가능한 뉴런 모델과 일반화된 스파이크 메시징은 딥러닝을 훈련시킬 수 있는 광범위한 새로운 신경망 모델을 제공한다. 초기 평가에 따르면 기존 로이히1에서 실행되는 표준 심층 네트워크 대비 로이히2에서 추론 당 60배 이상 초당 처리수(ops)가 감소하는 것으로 나타났다.
실제 로봇 시스템, 기존 프로세서 및 새로운 센서와의 매끄러운 통합으로 로이히2는 더 빠르고, 더 유연한 표준 입출력(I/O) 인터페이스를 통합해 로이히가 가진 실질적인 한계를 해결한다. 로이히2 칩은 이더넷 인터페이스, 더 넓은 범위의 이벤트 기반 비전 센서와의 글루리스(glueless) 통합 및 더 큰 메쉬드 네트워크(Meshed Network)를 지원할 예정이다.
한편, 인텔 뉴로모픽 리서치 커뮤니티(INRC)에는 현재 150개 이상의 회원이 소속되어 있으며, 올해 포드(Ford), 조지아 공과 대학교(Georgia Institute of Technology), 레이시온 테크놀로지(Raytheon Technologies), 텔레다인 플리어(Teledyne-FLIR), 사우스웨스트 연구소(SwRI: Southwest Research Institute) 등이 새롭게 합류했다.
신규 회원들은 인텔과 협력해 뉴로모픽 컴퓨팅의 상용화를 앞당길 수 있도록 학계, 정부 및 산업 파트너들과 함께 연구를 이어갈 예정이다. (로이히 기술에 대한 파트너사의 의견은 여기에서 확인할 수 있다.)
뉴로모픽 상용화를 위한 진전에는 ▷알고리즘 및 애플리케이션 연구 결과를 반영해 뉴로모픽 하드웨어의 지속적인 개선, ▷개발자가 서로 다른 그룹의 최상 알고리즘 아이디어를 벤치마킹, 통합 및 개선할 수 있도록 공통된 교차 플랫폼 소프트웨어 프레임워크 개발, ▷단기적 비즈니스 가치를 제공할 수 있는 상용화 사례를 찾기 위한 산업, 학계 및 정부 전반에 걸친 심층적인 협업 등 세 가지 축의 노력이 필요하다.
인텔의 이번 발표는 위에 열거한 세 가지 영역을 모두 포함하며, 새로운 기술을 바탕으로 컴퓨팅의 기초부터 다시 탐구하고 있는 뉴로모픽 연구자들에게 지능형 정보 처리의 획기적인 발전을 달성할 수 있도록 지원하는 도구를 제공할 예정이다.
인텔은 현재 INRC 회원사에게 뉴로모픽 리서치 클라우드(Neuromorphic Research cloud)를 통해 초기 평가를 위한 단일 칩 시스템인 오헤오 굴치(Oheo Gulch) 및 곧 선보일 8개의 칩 시스템인 카포호 포인트(Kapoho Point) 등 두 개의 로이히2 기반 뉴로모픽 시스템을 제공하고 있다.
라바 소프트웨어 프레임워크는 현재 깃허브(GitHub-다운)에서 무료로 다운로드할 수 있다. 인텔은 다음 달 개최 예정인 인텔 이노베이션 행사를 통해 로이히2(칩사양) 및 라바에 대한 자세한 자료를 제공할 예정이다.