현장을 모사한 대규모의 데이터 셋 및 피해자 위치 추정 알고리즘으로

지진, 화재, 태풍 등과 같은 대형재난이 세계적으로 급증하고 있는 가운데 위험한 재난 현장에서 신속하고 안전한 인명구조는 매우 중요하다.
재난 현장을 모사한 대규모의 데이터 셋을 구축하고 현장에서 피해자의 위치를 추정할 수 있는 알고리즘에 대한 연구결과가 나왔습니다.
지스트(광주과학기술원) 인공지능(AI)대학원의 전해곤 교수와 DGIST 임성훈 교수, KAIST 권인소 교수, 미국 카네기 멜론 대학교 등으로 구성된 공동 연구팀은 재난 구조 로봇의 시각인지를 위한 인공지능 알고리즘을 개발했다.
대형재난 대응에 대한 사회적인 요구에도 불구하고, 재난 구조 관련 연구들은 산업적 수요가 뒷받침되지 않아 활발히 연구되고 있지 않다.
특히, 인공지능 기술의 발전은 재난 구조 업무에 획기적인 패러다임을 제시할 것으로 보였지만, 관련 연구를 위한 데이터 셋 부족과 개발된 알고리즘을 검증할 프로토콜이 존재하지 않아 관련 연구가 지지부진한 상황이다.
게다가 재난 현장 데이터 셋은 취득이 어렵고 일부 취득한 데이터 셋도 인공지능 알고리즘 학습을 위해 주석화 하기에는 턱없이 부족한 실정이다.
연구팀은 가상현실 공간에서 재난 현장을 모사한 대규모의 데이터 셋을 구축하고실내외 가상환경에서 지진과 화재현장을 연출하였다.
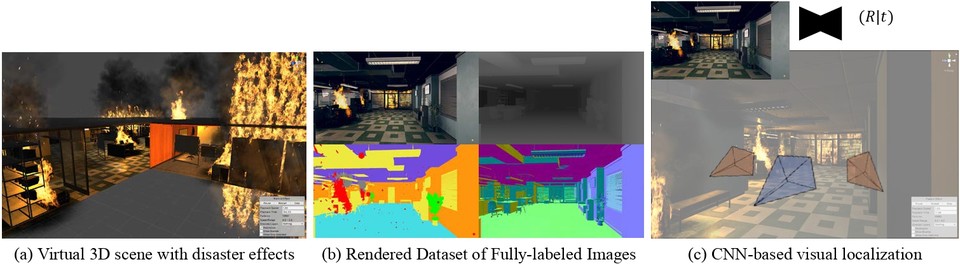
재난 전·후 상황을 같은 공간과 시점에서 정확히 비교할 수 있도록 영상을 획득하였고, 3차원 정보와 카메라 위치 정보 및 의미론적 영상 분할 정보를 주석화 하였다. 이와 더불어, 재난 전 상황에서 학습된 공간 정보를 바탕으로 재난이 발생한 상황에서 피해자의 위치를 단일 영상만을 이용해 추론할 수 있는 인공지능 알고리즘을 개발한 것이다.
전해곤 교수는 “본 연구는 가상현실 공간의 재난 상황을 인공지능을 활용한 시뮬레이션을 통해 빠르게 대응할 수 있는 재난 구조 로봇의 시각인지를 위한 인공지능 알고리즘을 제안하였다” 면서, "연구가 향후 다양한 재난 구조 연구를 촉발하는데 활용되기를 기대한다”고 말했다.
한편, 이번 연구는 산업통상자원부의 재난 현장 구조 및 인도적 지원을 위한 차세대 로봇 원천기술 한·미 공동연구 사업의 지원을 받아 수행되었으며, IEEE 패턴분석 및 머신지능(Transactions on Pattern Analysis and Machine Intelligence)에 '재해 대응을 위한 대규모 가상 데이터셋 및 자율적 위치 추정(A Large-scale Virtual Dataset and Egocentric Localization for Disaster Responses-보기)'이란 제목으로 지난 7월 거재됐다.