정확한 깊이 맵을 제공할 수 있는 센서는 제스처 인식, 물체 인식 및 장애물 탐지뿐만 아니라 자율적인 조작을 필요로 하는 로봇 및 드론 또는 VR, AR, MR 등과 같은 다양한 애플리케이션에 적용
소니 코퍼레이션 (Sony Corporation, 이하 소니)은 개선된 깊이 감지 성능과 소형화를 실현한 1/2 인치로 VGA 해상도를 가지는 백라이트 투사형(ToF, Time-Of-Flight) 이미지 센서 'IMX456QL'를 발표하고 2018년 4월부터 출시한다고 밝혔다.
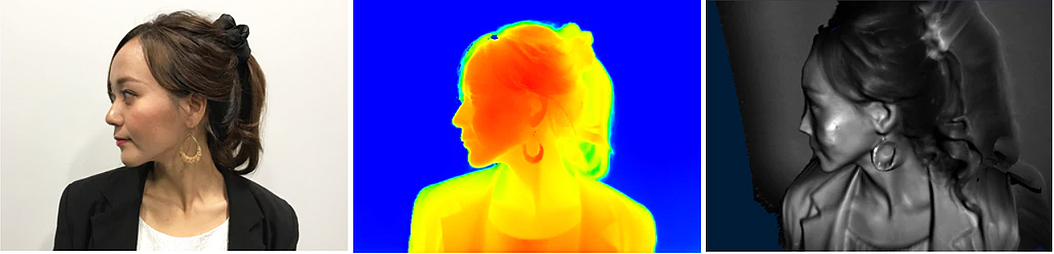
ToF 이미지 센서는 모든 픽셀에 대한 거리 정보를 감지하여 매우 정확한 깊이 맵을 생성한다. 근거리에서 원거리까지의 정확도를 더욱 높이려면 반사광을 효율적으로 받아야하고 신호 처리를 높은 프레임 속도로 실행돼야 된다.
이처럼 정확한 깊이 맵을 제공할 수 있는 IMX456QL 센서는 제스처 인식, 물체 인식 및 장애물 탐지뿐만 아니라 자율적인 조작을 필요로 하는 로봇 및 드론 또는 가상현실(VR), 증강현실(AR) 및 혼합현실(MR) 시스템과 같은 다양한 애플리케이션에 적용할 수 있다.
또한 원거리에서 가까운 거리까지 매우 정확한 거리 측정 성능을 갖춘 10μm 정사각형 픽셀의 개발을 통해 이 분야의 광범위한 응용 분야에서 사용할 수 있으며, ToF 기술을 사용하면 물체까지의 거리는 광원이 물체에 도달하여 센서로 다시 반사되는 데 걸리는 시간까지 정확히 측정된다.
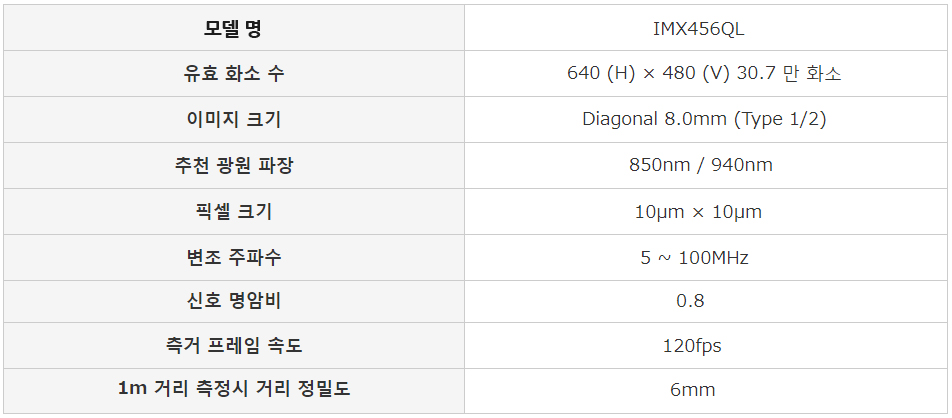
기존의 ToF 센서는 약 10 미터의 먼 거리를 측정하는데 어려움이 있지만, 신제품에는 이러한 거리에서 높은 감지율과 거리 측정이 가능하도록 감도 상승 모드가 있으며, 약 30 센티미터에서 1 미터의 가까운 거리에서 VGA 해상도의 고정밀 깊이 맵을 캡처할 수도 있다.
또 각 프레임의 깊이 맵을 캡처하기 때문에 레이저를 사용하여 거리 측정을 위해 대상을 스캔하는 경우보다 높은 프레임 속도로 움직이는 피사체의 왜곡을 현저히 줄이며 깊이 맵에서 이미지를 캡처할 수 있다.