여러 장애물이 있는 환경에서 30~40대의 자율 이동 로봇이 동시 이동하는 조건하에서 에이전트가 이동한 전체 범위를 탐색하는 종래 기술과 비교하여 탐색 범위를 10분의 1, 계산 시간을 1/2 정도로 줄이면서 동등한 경로를 도출..

최근 의료, 서비스 산업 등 제조업 현장과 다양한 분야에서 고령화 및 노동력 부족으로 인해 작업을 대체하고 자동화를 촉진하기 위해 로봇을 사용하는 경향이 가속화되고 있다.
특히, 물품의 반송 등의 분야에 있어서는 여러 목적지로 상품을 배송해야 하는 특별한 수요로 인해 여러 대의 자율 이동 로봇을 동시에 활용하여 작업 효율성을 향상시키는 많은 새로운 기술이 개발되고 있다.

그러나, 여러 로봇이 각각의 목적지에 효율적으로 도달할 수 있도록 하려면 경로 계획의 문제를 해결하여 안전과 장애물을 회피하고 에이전트 간의 충돌 없이 더 짧은 이동 경로를 도출하는 것은 필수적이다.
여기에, 2018년 4월, 오므론(OMRON)이 인공지능(AI)과 로봇 등 기술진화가 빠른 미래 성장 동력을 위해 설립한 ‘오므론 사이닉 엑스(OMRON SINIC X. 이하, OSX)는 복수의 자동 주행 로봇(이하, 에이전트)이 '충돌 없이 목적지까지 이동하는 방법(다중 에이전트 경로 계획)'에서 경로 도출의 효율을 대폭 개선할 수 있는 새로운 인공지능 기반 경로 계획 플랫폼을 개발하고 오픈소스로 공개했다.
플랫폼 ‘CTRM(Cooperative Timed RoadMaps)’은 머신러닝을 활용하고 접근법은 멀티 에이전트 경로 계획 문제와 해결책이 되는 경로를 미리 대량으로 준비하고 각 에이전트가 장애물과 다른 에이전트의 위치를 고려하면서 충돌을 피하고 협력적으로 목적지로 향하기 위해 각 에이전트의 이동 확률 분포를 학습한다.
그런 다음, 학습된 분포를 이전에 볼 수 없었던 새로운 경로 계획 문제 인스턴스에 사용하여 가능한 솔루션 경로와 관련이 없는 중복 위치를 제거하면서 각 에이전트의 목적지에 도달한다.
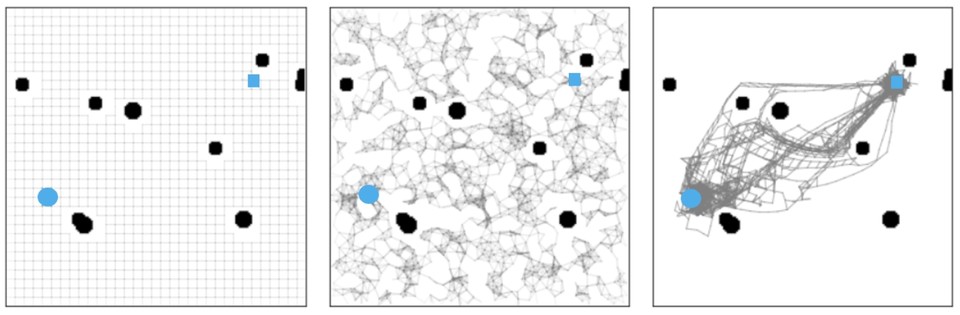
예를 들어, 여러 장애물이 있는 환경에서 30~40대의 에이전트가 동시 이동하는 조건하에서 에이전트가 이동한 전체 범위를 탐색하는 종래 기술과 비교하여 탐색 범위를 10분의 1 정도, 계산 시간을 1/2 정도로 줄이면서 동등한 경로를 도출할 수 있다고 한다.
한편, 이 연구 성과는 9일부터 13일까지 개최되는 자율 에이전트 및 다중 에이전트 시스템에 대한 국제회의 ‘AAMAS 2022(International Conference on Autonomous Agents and Multiagent Systems)’에서 '연속공간에서 다중 에이전트 경로계획을 위한 협력적 시간 로드맵 구축 학습(CTRMs: Learning to Construct Cooperative Timed Roadmaps for Multi-agent Path Planning in Continuous Spaces-다운)'란 제목으로 발표된다. 현재, 깃 허브를 통해 플랫폼(ctrm-다운)과 잭스맵((jaxmapp-다운) 두가지로 공개돼 있다.