사람처럼 촉감정보 판단 토마토 11종 98.7% 구분...에어갭 미세 조절을 통해 압력·굽힘센서 선택적 적용 가능
국내 연구진이 인공지능(AI)을 활용해 사물을 움켜잡아 물성을 파악하고 적절한 힘으로 제어할 수 있는 기술을 개발해 로봇기술의 미래를 활짝 열고 있다.
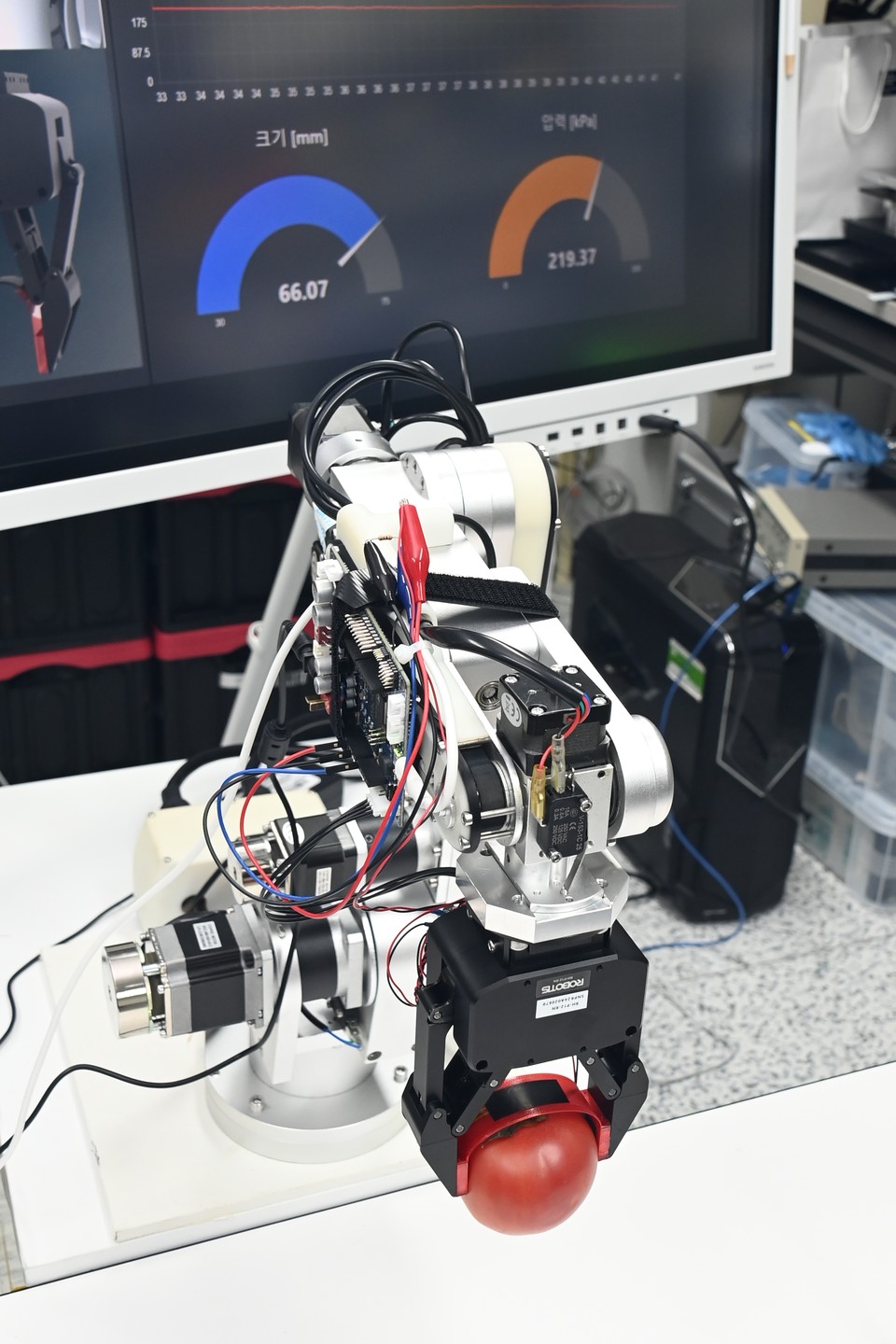
이 시술을 적용한 로봇은 토마토를 움켜쥐어 크기, 신선도, 촉감까지 판단한다.
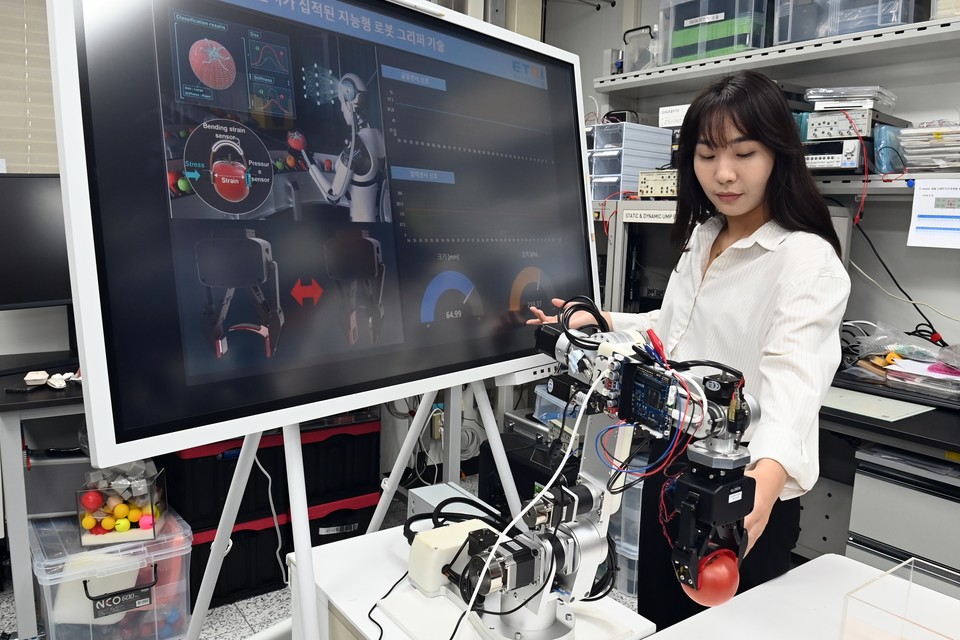
한국전자통신연구원(ETRI)은 유연한 멀티모달 센서를 활용해 다양한 물체의 크기, 형상, 물성을 정확하게 인지하고 효과적으로 제어할 수 있는 지능형 로봇 그리퍼를 개발했다.
향후 본 기술은 운송, 의료, 제조, 우주 산업 등 다양한 자동화 산업 영역에 효과적으로 적용될 전망이다.

이번 연구를 주도한 ETRI 지능형부품센서연구실 김혜진 책임연구원은 “개발한 촉각센서는 로봇 그리퍼에 다양한 촉각 기능을 부여해 자동화 라인 및 협업 로봇 분야에서 혁신적인 응용 가능성을 제시한다”고 말했다.
ETRI는 새로운 차세대 로봇 그리퍼 기술을 개발해 기존 로봇 그리퍼의 수동적 제어 시스템의 문제점을 극복하고 물체의 크기와 물성을 정확하게 감지하며 능동적으로 피드백을 제공할 수 있는 기술을 발표했다.
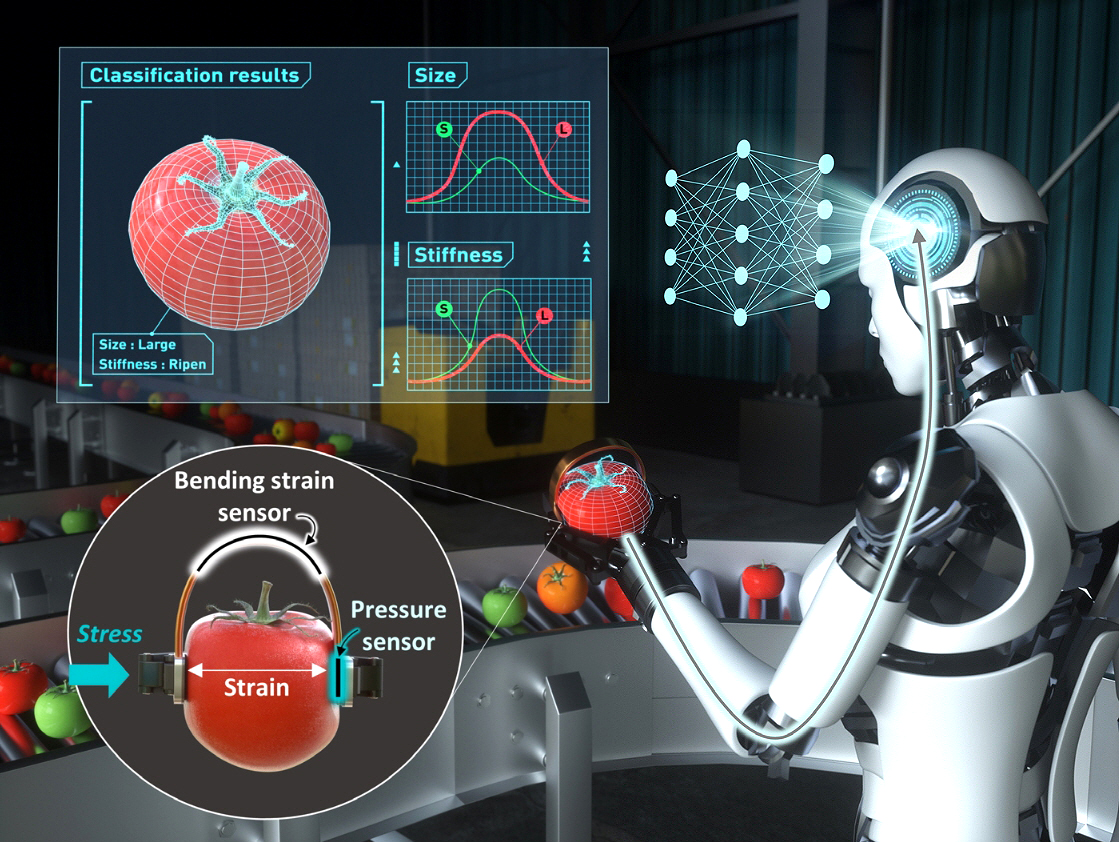
일상생활에서 채소나 과일을 손으로 눌러보면 무른지 단단한지 알 수 있는 것처럼 유연 멀티모달 촉각센서를 활용하면 물체의 초기 크기와 변형의 정도를 감지, 물체의 정확한 물성을 판단할 수 있다.
이를 기반으로 물체를 최적의 힘으로 잡거나 옮길 수 있게 된다.
이 기술은 대면적 고유연 다종센서 집적 기판 플랫폼, 에어갭 구조 기반의 고유연 멀티모달(압력/굽힘) 센서, 물체의 크기, 형상, 물성 등을 판별하는 인공지능 알고리즘 모델, 로봇 그리퍼의 촉각 피드백 제어 기술 등이 결합된 결과다.
유연 멀티모달 센서는 감지소재와 전극 사이의 에어갭을 미세하게 조절해 압력 및 굽힘센서의 감지 범위와 민감도를 선택적으로 조절하게 개발됐다. 또한, 로봇 그리퍼에 장착하고 물체에 가해지는 압력과 그리퍼의 굽힘 정도를 동시에 감지해 물체의 영률(단단한 정도)을 정확하게 판단한다.
이 센서는 보호층과 인터페이스 공정을 최적화해 1만 번 이상의 반복 압력과 굽힘 반복 시험 후에도 매우 안정적인 성능을 보였다. 아울러, 저온 및 고습 환경에 대한 신뢰성도 검증됐다.
연구진은 멀티모달 촉각센서가 집적된 지능형 로봇 그리퍼가 다양한 크기와 물성을 갖는 토마토 11종을 98.78%의 정확도로 구분했다고 설명했다. 이로써 시간에 따라 완숙 여부가 달라지는 토마토의 숙성도까지 실시간 선별해낼 수 있다.
아울러, 지능형 로봇 그리퍼는 유연 멀티모달 센서를 통해 어떤 물체를 집는지 능동적으로 이해하고 안정적으로 물체를 파지하는 시점을 결정하며 상응하는 그리퍼의 힘(토크)을 조절해 피드백을 제공한다.
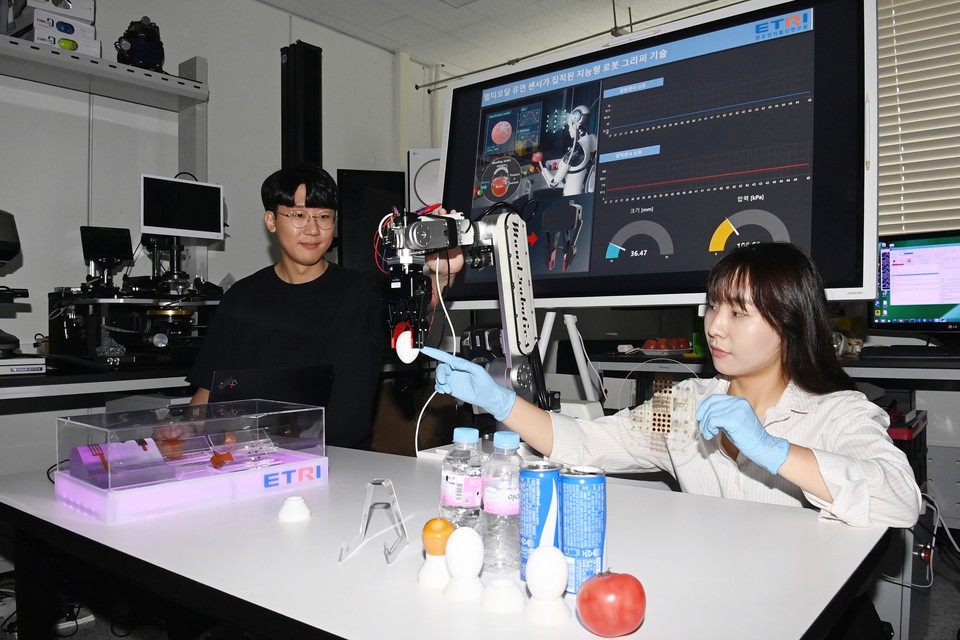
향후 연구진은 압력과 굽힘을 감지하는 2종 센서 외에도 온/습도센서, 관성센서, 거리센서 등을 하나의 센서 플랫폼으로 집적하는 기술을 개발할 예정이다. 또한, 다종의 센서가 집적된 유연 인장형 멀티모달 인공피부를 로봇 그리퍼에 적용함으로써 사람처럼 빠르고 자연스러운 동작이 가능한 차세대 지능형 그리퍼 기술을 개발키로 했다.
연구진은 본 기술을 자동화 산업 관련 기업에 기술이전하여 상용화를 위해 노력할 계획이다.
한편, 이 기술은 인공지능 분야의 저명한 학술지인 어드밴스드 인텔리전트 시스템즈(Advanced Intelligent Systems)에 '변형물 분류를 위한 에어 갭 제어 바이모달 촉각센서를 이용한 지능형 그리퍼 시스템(Intelligent gripper system using air gap-controlled bimodal tactile sensors for deformable object classification-다운)'란 제목으로 지난달 30일 게재되었다.